


礦用無人駕駛系統(tǒng)深度技術(shù)解析
我國發(fā)布的《中國制造 2025》中明確指出將智能網(wǎng)聯(lián)汽車作為一項重點發(fā)展對象,,并定義智能網(wǎng)聯(lián)汽車是指搭載先進的車載傳感器,、控制器,、執(zhí)行器等裝置,,并融合現(xiàn)代通信與網(wǎng)絡技術(shù),,實現(xiàn)車內(nèi)網(wǎng),、車外網(wǎng)、車際網(wǎng)的無縫鏈接,,具備信息共享,、復雜環(huán)境感知、智能化決策,、自動化協(xié)同等控制功能,,與智能公路和輔助設施組成的智能出行系統(tǒng),可實現(xiàn)“高效,、安全,、舒適、節(jié)能”行駛的新一代汽車,。
然而,,經(jīng)歷幾年的快速發(fā)展后,無人駕駛整個產(chǎn)業(yè)在2018年中期進入拐點,,行業(yè)的冷靜期更像是特定場景無人駕駛爆發(fā)的一味催化劑,,像礦用無人駕駛這種更容易落地的封閉園區(qū)、低速,、載物細分場景在2019年,、2020年則成為了行業(yè)資本追逐的熱點,各家技術(shù)進展也都達到了既定的階段目標,。

易控智駕作為一家有責任的高科技公司,,愿意以開放的心態(tài)助力無人駕駛產(chǎn)業(yè)的發(fā)展,,并積極在礦用無人駕駛的細分領(lǐng)域為國家的人工智能發(fā)展分享自己的階段經(jīng)驗。
一,、易控智駕礦用無人駕駛系統(tǒng)建設目標
礦用運輸無人駕駛技術(shù)近十年在國內(nèi)外逐漸興起并成為智慧礦山的關(guān)鍵組成技術(shù)要素,,智能化、數(shù)字化,、無人化,、網(wǎng)聯(lián)化成為智慧礦山技術(shù)的最前沿,是未來工業(yè)互聯(lián)網(wǎng)的重要發(fā)展方向,。政策的大力支持也為礦用無人駕駛技術(shù)的發(fā)展指明了方向,,如國家煤礦安全監(jiān)察局公告2019年第1號《煤礦機器人重要研發(fā)目錄》文件中已將“露天礦卡無人駕駛系統(tǒng)”列為重點研發(fā)項目。
為響應《中國制造2025》對智能制造的指示及《全國礦產(chǎn)資源規(guī)劃(2016—2020年)》堅持綠色發(fā)展強化資源節(jié)約集約循環(huán)利用要求,,在礦區(qū)實施無人駕駛運輸,,可實現(xiàn)采運優(yōu)化配置和產(chǎn)能柔性匹配,為建設智慧礦山提供根本性的支持,,并帶來非常大的經(jīng)濟效益和社會效益,。露天礦無人駕駛系統(tǒng)產(chǎn)品總體目標如下:

二、易控智駕礦無人駕駛系統(tǒng)設計原則

1,、實用性和集成性
一個中大型礦山的作業(yè)車隊往往都由幾百至上千臺不同類型設備/ 車輛組成,,無人駕駛系統(tǒng)應支持人工/ 無人駕駛工程車輛混合運行,以滿足現(xiàn)場實際運行需要,。
易控智駕礦用無人駕駛系統(tǒng)的軟硬件設計和集成,,以實用性為第一宗旨,在系統(tǒng)充分適應露天礦汽車運輸應用需求的基礎上再來考慮其他的性能,。易控智駕設計所包含的內(nèi)容很多,,系統(tǒng)設計時必須能將各種先進的軟硬件設備有效地集成在一起,使系統(tǒng)的各個組成部分充分發(fā)揮作用,,協(xié)調(diào)一致地進行安全高效工作,。
2、標準性和開放性
只有支持標準性和開放性的系統(tǒng),,才能支持與其他開放型系統(tǒng)一起協(xié)同工作,,易控智駕在網(wǎng)絡中采用的硬件設備及軟件產(chǎn)品支持國際工業(yè)標準或行業(yè)公認標準,以便能和不同廠家的互補型開放產(chǎn)品在同一網(wǎng)絡中的不同層級同時共存互通,;通信中采用標準的通信協(xié)議以使不同的操作系統(tǒng)與不同的網(wǎng)絡系統(tǒng)及不同的網(wǎng)絡之間順利進行通信,。
3、先進性和安全性
易控智駕礦用無人駕駛系統(tǒng)所有的組成要素均充分考慮其先進性,。并沒有一味地追求實用而忽略先進性,,只有將當今最先進的技術(shù)和露天礦實際應用要求緊密結(jié)合,才能獲得最大的系統(tǒng)性能和效益。礦用無人駕駛系統(tǒng)的網(wǎng)絡安全也是至關(guān)重要的,。包括礦用自卸車在內(nèi)的礦用生產(chǎn)設備具有自身價值高,、運行環(huán)境復雜等特點,無人駕駛系統(tǒng)應能對周圍環(huán)境與車輛的安全相關(guān)因素進行監(jiān)控,。當出現(xiàn)影響行車安全的異常情況或故障時,,無人駕駛系統(tǒng)應能夠?qū)χ車惓G闆r或故障進行響應,確保設備安全和運行安全,。
4,、成熟性和可靠性
由于礦山作業(yè)環(huán)境惡劣,礦用生產(chǎn)設備的失效將造成礦區(qū)生產(chǎn)能力下降甚至停產(chǎn),,最終帶來巨大的經(jīng)濟損失,。這對無人駕駛系統(tǒng)的可靠性和易維護性提出了嚴苛的要求。因此,,易控智駕礦用無人駕駛系統(tǒng)需采用嚴格的工業(yè)設計標準,,按照模塊化設計的思路,對關(guān)鍵部件進行冗余設計,,在確保系統(tǒng)穩(wěn)定,、可靠運行的前提下,還需要考慮系統(tǒng)整體的容錯能力,、安全性及穩(wěn)定性,,使系統(tǒng)出現(xiàn)問題和故障時能迅速地修復,達到每周7x24小時工作的要求,。
易控智駕礦用無人駕駛系統(tǒng)體系結(jié)構(gòu)應在實際應用中能經(jīng)過較長時間的考驗,,在運行速度和性能上都應是穩(wěn)定可靠的,,擁有完善,、實用的解決方案。同時,,從長遠的技術(shù)發(fā)展來選擇具有很好前景的,、較為先進的技術(shù)和產(chǎn)品選型,以適應系統(tǒng)未來的發(fā)展需要,。
5,、維護性和管理性
礦山作業(yè)由大量、多類型工程車輛配合實施完成,,無人駕駛系統(tǒng)不僅涉及單個車輛的無人駕駛,,而且涉及多車的協(xié)同控制和任務調(diào)度。這就要求系統(tǒng)具有高度的自動化和高效的調(diào)度能力,,并能智能地處理各類復雜場景,。
易控智駕礦用無人駕駛系統(tǒng)中的互連設備,使用方便,、操作簡單易學,,并便于維護和管理,。在設計和實現(xiàn)應用系統(tǒng)時,必須充分考慮整個系統(tǒng)要便于維護,,以使系統(tǒng)在發(fā)生故障時能提供有效手段及時進行恢復,,盡量減少損失。
6,、擴充性和兼容性
易控智駕礦用無人駕駛系統(tǒng)架構(gòu)應具有可擴展性,,在系統(tǒng)結(jié)構(gòu)、系統(tǒng)容量與處理能力,、物理聯(lián)接,、產(chǎn)品支持等方面具有擴充與升級換代的可能,采用的產(chǎn)品要遵循通用的國際工業(yè)標準,,以便不同類型的設備的接入,,滿足系統(tǒng)規(guī)模擴充的要求。
三,、易控智駕礦用無人駕駛系統(tǒng)模型設計
易控智駕礦用無人駕駛系統(tǒng)模型根據(jù)現(xiàn)有露天礦信息化管理層級設計了5個層次:集團決策層,、經(jīng)營管理層、生產(chǎn)執(zhí)行層,,控制層,,車輛作業(yè)層。
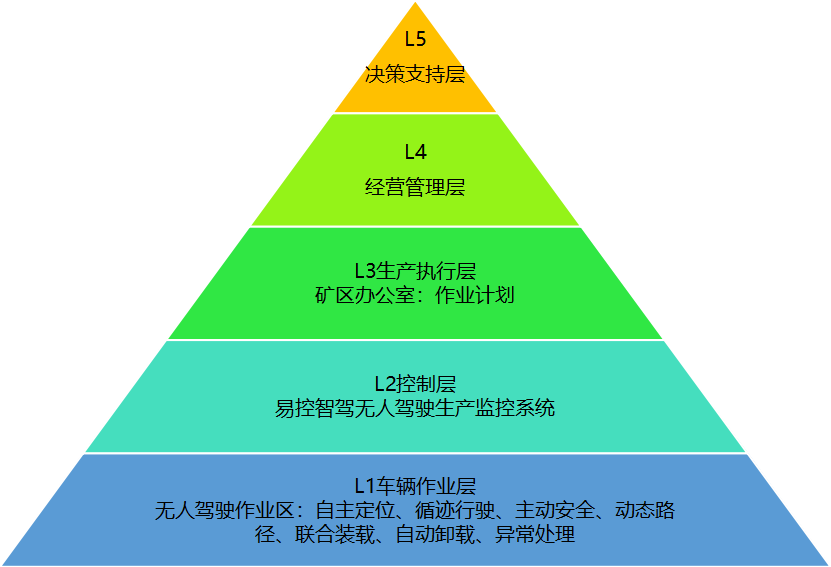
集團決策層和經(jīng)營管理層是智慧礦山整體決策和管理單位,。
生產(chǎn)執(zhí)行層的主要根據(jù)礦山企業(yè)的生產(chǎn)計劃對各個裝載點及其車流進行規(guī)劃,,在需要調(diào)度無人駕駛運輸車輛時,根據(jù)實際生產(chǎn)情況以車流規(guī)劃為基礎生成運輸作業(yè)任務,。

控制層主要接收作業(yè)計劃層輸入的運輸作業(yè)任務,,根據(jù)作業(yè)任務為無人駕駛運輸車輛規(guī)劃運行路徑并下發(fā)至車輛執(zhí)行,在無人駕駛車輛執(zhí)行運輸作業(yè)過程中,,監(jiān)控車輛的運行狀態(tài),,在必要的情況下可人工對車輛運行進行遠程干預。
車輛作業(yè)層的主要是接收作業(yè)管理與監(jiān)控層下發(fā)的作業(yè)任務與運行路徑信息,,根據(jù)上述信息控制車輛循跡行駛,,并完成土方的協(xié)同裝載與自動卸載作業(yè),將車輛作業(yè)過程中的各種狀態(tài)信息反饋至車輛作業(yè)層,。
在礦山運輸作業(yè)過程中,,采用無人駕駛技術(shù)可以實現(xiàn)在惡劣的環(huán)境中無需駕駛員在現(xiàn)場進行作業(yè)的目標。然而,,在目前易控智駕的模型設計中,,運行初期幾年仍需設置必要的管理、調(diào)度與輔助人員。
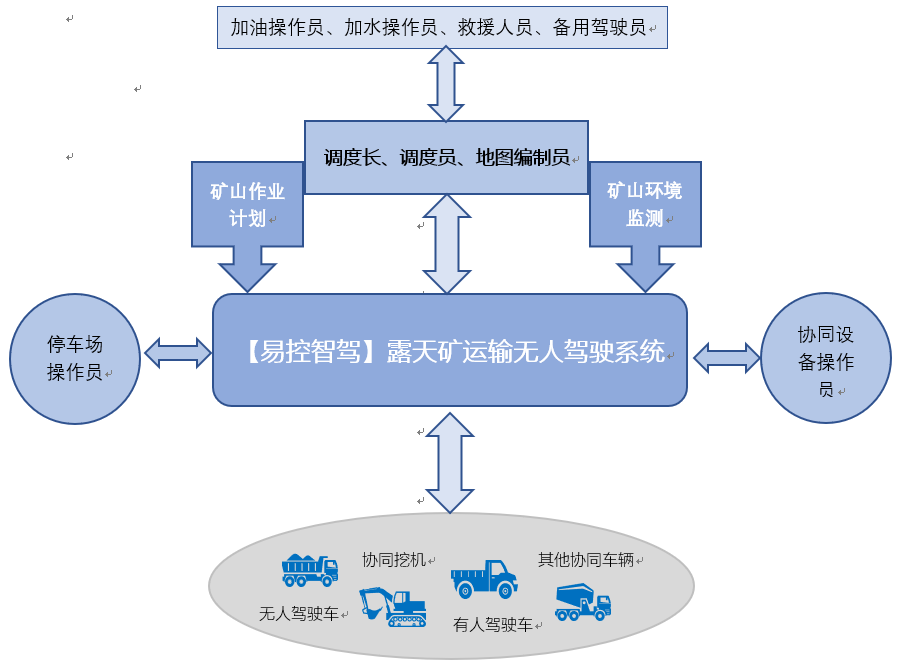
調(diào)度長是礦區(qū)調(diào)度中心的主管人員,,負責為調(diào)度員與地圖編制員分配工作任務,,并對無人駕駛作業(yè)區(qū)的總體運行情況進行監(jiān)控。
調(diào)度員監(jiān)控所負責的無人駕駛運輸車輛的運行情況,,在異常情況下對車輛進行遠程干預,。調(diào)度員可從無人駕駛系統(tǒng)中獲取到車輛基本狀態(tài)、車載設備運行狀態(tài),、車輛周圍視頻,、礦區(qū)關(guān)鍵位置視頻等信息,同時調(diào)度員可向所負責的無人駕駛運輸車輛下發(fā)各種控制命令,。
地圖編制員負責創(chuàng)建,、編輯、維護和發(fā)布無人駕駛系統(tǒng)的礦山數(shù)字地圖,。
停車場操作員可從礦山運輸無人駕駛系統(tǒng)中獲取停車場內(nèi)和入口處的車輛位置及狀態(tài)信息,,接收和執(zhí)行調(diào)度員下發(fā)的操作指令(包括車輛上電、斷電等),,并將執(zhí)行結(jié)果反饋給調(diào)度員,。
協(xié)同設備操作員,例如挖掘機操作員/裝載機操作員可與無人駕駛系統(tǒng)進行必要的信息交互,,交互的信息包括“進車信號”,、“裝車信號”、“出車信號”等,,通過這些信息交互來保證裝載作業(yè)的順利進行,。
加油/ 加水操作員負責為無人駕駛車輛進行加油/ 加水。當無人駕駛運輸車輛運行至加油點/ 加水點時,,在調(diào)度員的配合下,,加油/ 加水操作員完成車輛的加油/ 加水作業(yè)。
救援人員負責對故障的無人駕駛運輸車輛進行救援,。經(jīng)過調(diào)度員分配任務和調(diào)度長確認后,,救援人員才可以進入礦用無人駕駛作業(yè)區(qū)域內(nèi)對故障車輛進行檢修,、人工駕駛等操作,。
無人駕駛礦用自卸車可接收和執(zhí)行無人駕駛系統(tǒng)下發(fā)的各種控制指令,并向無人駕駛系統(tǒng)反饋自身狀態(tài)信息,。
挖掘機上安裝了專用的客戶端,,具備定位、通信,、信息交互功能,。通過該客戶端,挖掘機可將自身的基本狀態(tài)信息,包括位置,、高程,、姿態(tài)、速度,、加速度,、故障等信息發(fā)送至無人駕駛系統(tǒng),挖掘機操作員與無人駕駛系統(tǒng)的信息交互也是通過該客戶端完成的,。

為保證礦山運輸作業(yè)的安全性,,所有進入礦用無人駕駛作業(yè)區(qū)域內(nèi)的人工駕駛車輛均應安裝定位裝置。人工駕駛車輛包括推土機,、平地機,、灑水車、壓路車,、油罐車,、人工駕駛礦用自卸車、通勤車,、指揮車等,。安裝了定位裝置的車輛具備自主定位信息,可將自身的位置,、姿態(tài),、速度等信息反饋給無人駕駛系統(tǒng)。
無人駕駛系統(tǒng)具備與礦山作業(yè)計劃系統(tǒng)連接的接口,,可接收并執(zhí)行作業(yè)計劃系統(tǒng)向無人駕駛系統(tǒng)下發(fā)的作業(yè)計劃信息,。無人駕駛系統(tǒng)具備與礦山環(huán)境監(jiān)測系統(tǒng)連接的接口,可接收環(huán)境監(jiān)測系統(tǒng)的各種信息,,包括天氣信息,、邊坡狀態(tài)信息、火災信息,、洪災信息等,。
四、易控智駕礦用無人駕駛系統(tǒng)系統(tǒng)架構(gòu)
根據(jù)礦山運輸作業(yè)的特點和礦山運輸無人駕駛系統(tǒng)的作業(yè)組織模型,,易控智駕設計了礦用自動駕駛整體解決方案,,包括運營監(jiān)控平臺、自動駕駛系統(tǒng),、LTE-V2X通信技術(shù),、礦車定制設計四大部分。
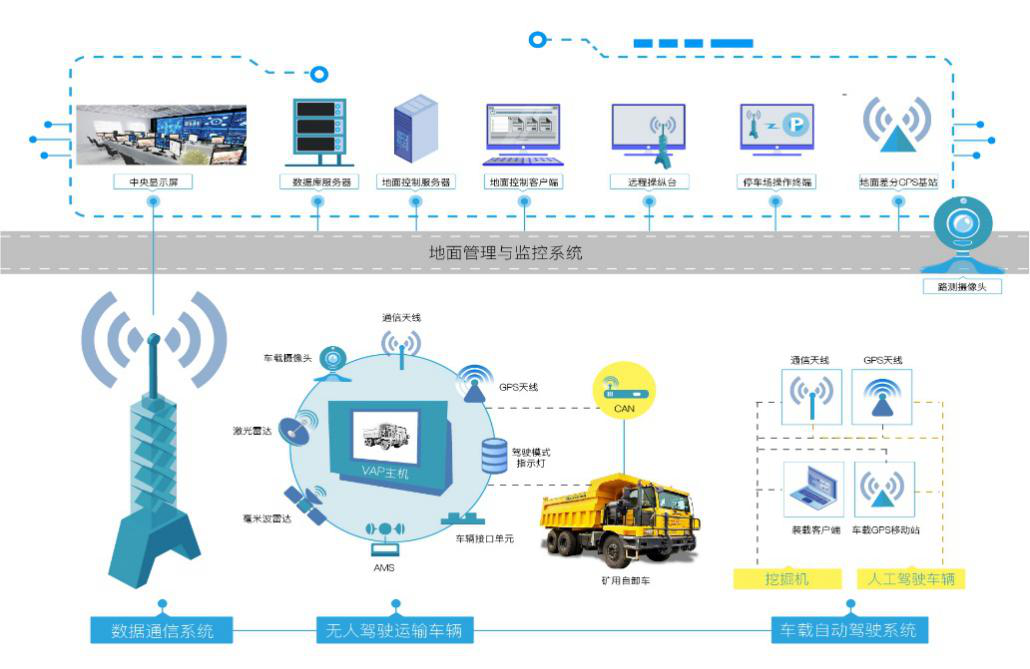
平臺方面,,易控智駕借鑒成熟的商用車車聯(lián)網(wǎng)系統(tǒng)和傳統(tǒng)的礦用車調(diào)度系統(tǒng),,加上大數(shù)據(jù)挖掘,、4G/5G無線物聯(lián)與智能遠程控制等技術(shù)手段,基于分布式架構(gòu)將復雜的車輛總線信息處理,、移動通信數(shù)據(jù)處理,、負載均衡、大數(shù)據(jù)管理與分析,、服務器集群技術(shù)等封裝在一起,,構(gòu)建適合自動駕駛礦用車運營的平臺。
具體來說,,就是由一個裝備了GPS+RTK高精度定位系統(tǒng)的車隊組成監(jiān)測中心,,為每輛車指定運輸目的地,車輛通過接收無線指令以合適的速度按照目標路線運行,,卡車由GPS,、控制中心無線指令(信息)和其它導引裝置來確定車輛在礦山的準確坐標以及周圍的情況,使得車輛能在自動操作的情況下實現(xiàn)復雜的裝載,、運輸和卸載循環(huán)的自動運行,。

?
易控智駕礦用無人駕駛平臺提供礦山運輸作業(yè)所需的礦山數(shù)字地圖,對運輸車輛的運行路徑進行規(guī)劃,,在作業(yè)過程中獲取礦區(qū)車輛信息,,采集礦區(qū)設備狀態(tài),自動維護礦區(qū)作業(yè)進度信息,,為用戶提供清晰,、直觀的礦區(qū)信息綜合顯示接口和人工干預控制接口,為車輛提供基于“故障導向安全”原則的自動作業(yè)調(diào)度及主動防撞指令,。易控智駕礦用無人駕駛平臺的功能圍繞實現(xiàn)綜合顯示與智能調(diào)度的安全,、高效、自動化的目標進行合理分解,,主要包括數(shù)字地圖,、路徑規(guī)劃、作業(yè)調(diào)度,、運行監(jiān)控,、數(shù)據(jù)記錄等。
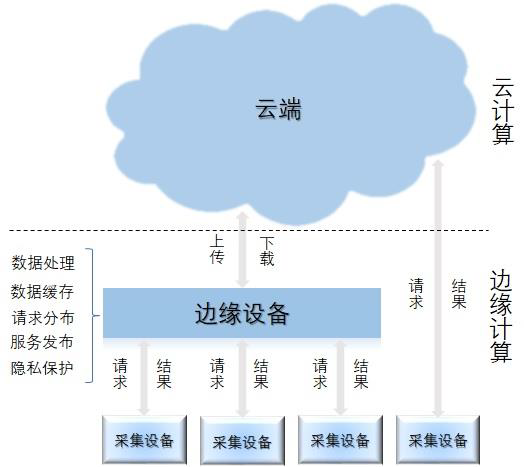
LTE-V2X 方面,,易控智駕已形成可運營的完整網(wǎng)絡體系,,能夠在高頻段、高車流量的環(huán)境下提供可靠的通信能力,,并且在大容量,、低時延、抗干擾性以及??可管理性等方面更為成熟,。
 ?
?
易控智駕LTE-V2X產(chǎn)品設計?具有的突出優(yōu)勢:
l?部署成本低,,可以重復利用既有蜂窩網(wǎng)絡的基礎設施;
l?覆蓋范圍廣,,可擴展至數(shù)百米以上的非視距范圍,;
l?數(shù)據(jù)傳輸速率高,峰值上行?500Mbps,、下行?1Gbps,。
l?數(shù)據(jù)通信系統(tǒng)包括有線通信和無線通信。
l?無人駕駛系統(tǒng)設備之間通過有線通信進行數(shù)據(jù)交換,。LTE-V2X作為平臺和無人駕駛車之間的橋梁,,承擔著兩者間低延時、高速率,、大容量,、高安全性的數(shù)據(jù)傳輸任務。LTE-V2X設備負責將車輛基本狀態(tài),、無人駕駛系統(tǒng)狀態(tài),、環(huán)境感知信息和礦區(qū)關(guān)鍵位置、視頻監(jiān)控信息等數(shù)據(jù)實時傳回至平臺,;同時負責將平臺確定的作業(yè)任務,、參考路徑、車輛控制命令等數(shù)據(jù)實時傳輸至無人駕駛車輛,,實現(xiàn)兩者間高效的信息互聯(lián),。
l?在當前通信技術(shù)條件下,采用LTE+WiFi 雙網(wǎng)架構(gòu),,主用網(wǎng)絡為LTE,,備用網(wǎng)絡為WiFi,均采用4G/5G專網(wǎng),。LTE 具有覆蓋面廣和抗干擾能力強的特點,,WiFi 在設備通用性和傳輸速率上具有優(yōu)勢,將LTE與WiFi技術(shù)相結(jié)合,,實現(xiàn)雙網(wǎng)熱備冗余及無縫切換,,能夠有效提高網(wǎng)絡的覆蓋范圍和抗干擾能力,這是可行和合理的,。
礦車定制設計方面,,易控智駕依托同力重工自主開發(fā)的TLI系列線控化智能車型,優(yōu)化自動駕駛硬件配置前裝匹配及通信協(xié)議匹配,。

五,、易控智駕礦用無人駕駛系統(tǒng)作業(yè)場景適配設計
理解重塑并明確礦用運輸無人駕駛系統(tǒng)的作業(yè)場景,是進行系統(tǒng)研發(fā)和測試的基礎,。作業(yè)場景描述反映了礦山運輸作業(yè)對無人駕駛系統(tǒng)的實際需求,,也體現(xiàn)了無人駕駛系統(tǒng)中各個子系統(tǒng)之間的協(xié)同關(guān)系,。通過場景描述可以確定各個場景內(nèi)部相關(guān)工作人員的職責和子系統(tǒng)的功能設置,并反映內(nèi)部邏輯關(guān)系,。
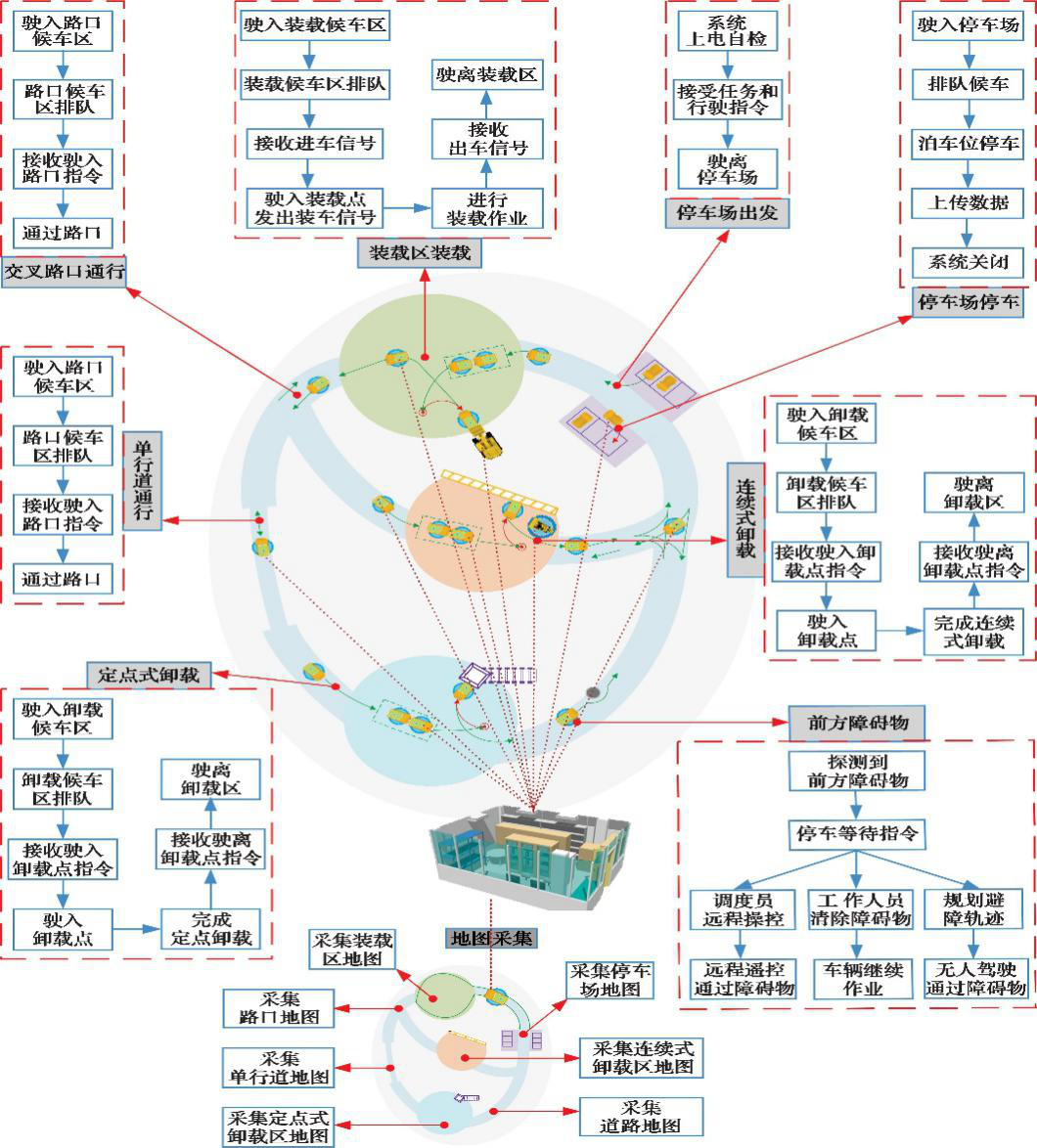
此圖引用自中車論文
礦用運輸無人駕駛系統(tǒng)正式運行前,,需先創(chuàng)建礦山數(shù)字地圖,即包括停車場,、裝載區(qū),、破碎站、排土場,、道路,、障礙物等地圖單元的數(shù)字地圖。數(shù)字地圖創(chuàng)建工作由地圖編制員主導,,在人工駕駛車輛駕駛員的配合下完成,。
無人駕駛礦用自卸車啟動時,首先進行系統(tǒng)上電自檢,,自檢通過,,單車智能系統(tǒng)接收并執(zhí)行平臺下發(fā)的作業(yè)任務和參考路徑指令,控制車輛從停車場出發(fā),。
無人駕駛礦用自卸車通過路口時,,單車智能系統(tǒng)控制車輛駛?cè)肼房诤蜍噮^(qū),排隊等待通行,。收到平臺發(fā)出的允許通行指令后,,車輛通過路口。無人駕駛作業(yè)區(qū)域范圍內(nèi)可能存在單車道,,通過單車道的場景與通過路口的場景類似,。
執(zhí)行裝載作業(yè)時,單車智能系統(tǒng)控制無人駕駛礦用自卸車駛?cè)牒蜍噮^(qū)等候裝載,,收到挖掘機操作員發(fā)出的“進車信號”后,,單車智能系統(tǒng)控制車輛行駛至裝載點執(zhí)行裝載。挖掘機操作員完成裝載作業(yè)后向單車智能系統(tǒng)發(fā)送“出車信號”,,單車智能系統(tǒng)收到該信號后將根據(jù)平臺 的指令控制車輛駛離裝載區(qū),。
卸載作業(yè)主要分為定點式卸載作業(yè)和連續(xù)式卸載作業(yè),2 種卸載作業(yè)的處理流程相似,。無人駕駛礦用自卸車執(zhí)行定點式卸載作業(yè)時,,單車智能系統(tǒng) 控制車輛駛?cè)胄遁d候車區(qū)排隊等候,收到平臺 發(fā)出的卸載指令后,,單車智能系統(tǒng) 控制自卸車行駛至卸載點進行卸載,。在完成卸載作業(yè)后,單車智能系統(tǒng) 根據(jù)平臺的指令控制車輛駛離卸載區(qū),。
無人駕駛礦用自卸車返回停車場后,,首先在停車場入庫排隊候車,;單車智能系統(tǒng) 收到泊車指令之后,控制車輛駛?cè)氩窜囄煌\?;車輛停止后,,單車智能系統(tǒng) 向平臺 上傳本班次的車載運行數(shù)據(jù),,完成上傳后關(guān)閉單車智能系統(tǒng),。
當單車智能系統(tǒng)檢測到車輛前方運行路徑上存在障礙物時,首先控制車輛停車并將障礙物信息上傳給平臺,,此時調(diào)度員可在礦區(qū)視頻監(jiān)控客戶端上查看到障礙物信息,。礦用運輸無人駕駛系統(tǒng)提供3種方式應對障礙物場景:一是平臺自動規(guī)劃一條繞過障礙物所在區(qū)域的參考路徑并下發(fā)給單車智能系統(tǒng),經(jīng)調(diào)度員確認后,,單車智能系統(tǒng)控制車輛沿著參考路徑繞過障礙物后繼續(xù)作業(yè),;二是調(diào)度員使用遠程操縱功能,控制車輛低速通過障礙物所在區(qū)域,;三是調(diào)度員通知道路維護人員清理障礙物,,障礙物被清理完后系統(tǒng)將繼續(xù)作業(yè)。
六,、易控智駕露天礦無人駕駛系統(tǒng)社會經(jīng)濟效益以及推廣前景

易控智駕無人駕駛相對傳統(tǒng)人工駕駛具有更安全,、更環(huán)保,更高效等優(yōu)勢,,帶來的社會經(jīng)濟效益主要包括以下幾個方面:
1)提高生產(chǎn)安全性
通過無人駕駛系統(tǒng)替代駕駛員,,可避免由于駕駛員疲勞、操作失誤導致的危險事故,;而且人眼感知有盲區(qū),,通過超越可視距離、消除盲區(qū)的感知和關(guān)鍵單元的冗余,,增強系統(tǒng)安全性,。 在無人駕駛系統(tǒng)擴展到整個礦區(qū)的工程作業(yè)車輛后,可實現(xiàn)整個生產(chǎn)作業(yè)區(qū)域的無人化,,從根本上杜絕生產(chǎn)過程中人員安全事故的發(fā)生,。替代駕駛員,可避免由于駕駛員疲勞,、操作失誤導致的危險事故,;而且人眼感知有盲區(qū),通過超越可視距離,、消除盲區(qū)的感知和關(guān)鍵單元的冗余,,增強系統(tǒng)安全性。
2)有效降低生產(chǎn)成本
通過無人駕駛系統(tǒng)替代駕駛員,,可以節(jié)省駕駛員人工成本,;同時,,礦山作業(yè)環(huán)境惡劣,且交通不便,,需有后勤保障人員為駕駛員提供后勤服務,,通過無人駕駛系統(tǒng)可以節(jié)省后勤成本;可有效降低燃油消耗,,采用無人駕駛,,系統(tǒng)在駕駛過程中通過精準操作,采用最優(yōu)的駕駛策略,,可有效提升駕駛效率,,降低燃油消耗、節(jié)省燃油費用,,同時可減少碳排放,,并降低空氣污染;可減少部件磨損,,無人駕駛系統(tǒng)采用最優(yōu)的,、高度一致的駕駛策略,可有效降低包括輪胎等易損,、易耗部件在內(nèi)的損耗,。
3)?有效提高生產(chǎn)效率
采用無人駕駛系統(tǒng),各礦用工程車信息互聯(lián),,可實現(xiàn)整個作業(yè)區(qū)域內(nèi)車輛的集群調(diào)度,,可有效提高車輛的利用率和作業(yè)效率。同時,,通過實時,、不間斷關(guān)鍵設備狀態(tài)采集,結(jié)合最佳的設備維護策略,,提供自動化的維護作業(yè)提示與建議,,可有效提高維護效率,降低礦車故障率,。
4)實現(xiàn)柔性產(chǎn)能配置
采用無人駕駛系統(tǒng)后,,礦山企業(yè)將能夠根據(jù)市場需求,靈活調(diào)整產(chǎn)能,,可有效解決產(chǎn)能高峰期駕駛員招聘和新駕駛員培訓周期長,,產(chǎn)能低谷期負擔重和裁員等問題。礦山運輸無人駕駛系統(tǒng)是一類具有計劃性,、組織性,、工作區(qū)域封閉的運輸作業(yè)系統(tǒng)的典型代表。礦山運輸無人駕駛運輸系統(tǒng)的基本概念和模式可以推廣到具有這種類型特點的其他領(lǐng)域,例如物流園,、農(nóng)場,、集裝箱港口等;也可應用到不便于人工作業(yè)的一些特殊危險區(qū)域,,如無人駕駛系統(tǒng)可替代駕駛員在具有潛在危險因素威脅的環(huán)境下(如爆破飛石,、山體滑坡等)工作。相比于傳統(tǒng)的人工駕駛,,采用無人駕駛系統(tǒng)可以減少對作業(yè)環(huán)境的限制,,可在強輻射、高海拔,、干燥沙漠等各種嚴酷環(huán)境下作業(yè),。

評論
已有條評論